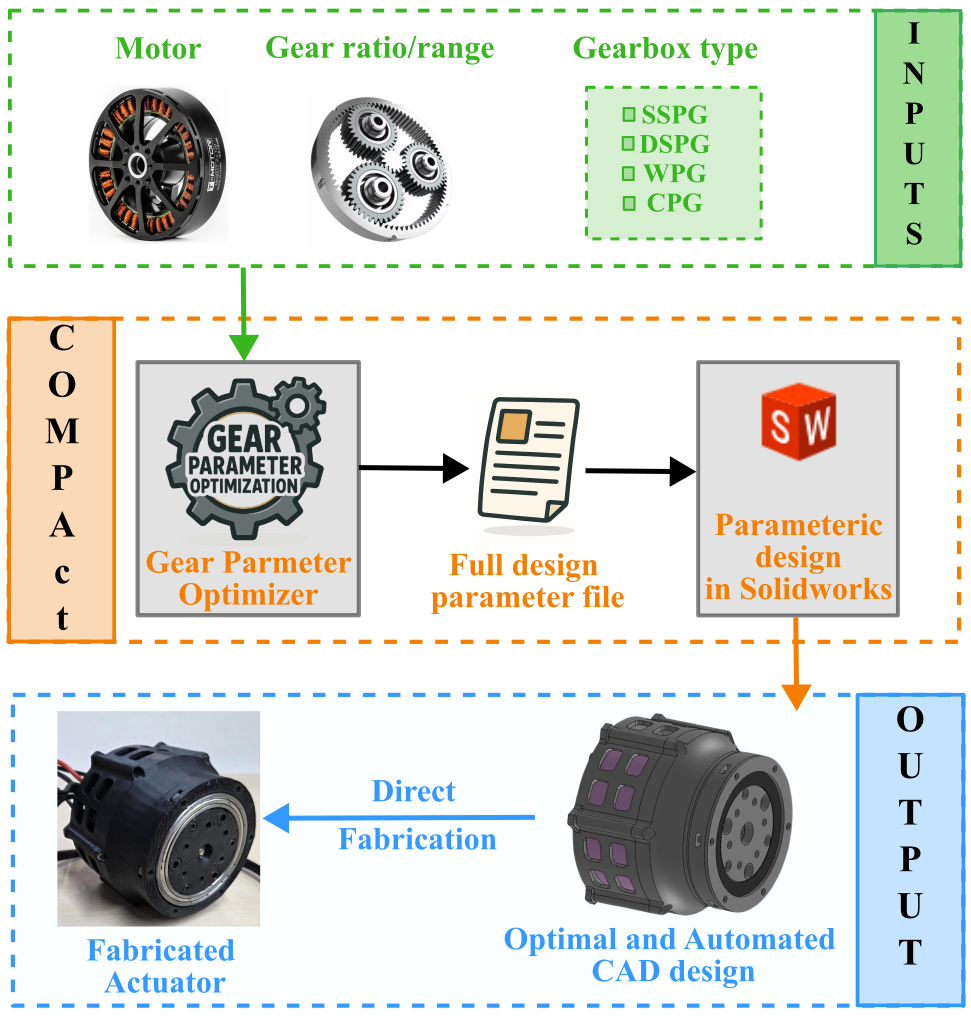
@misc{singh2025compactcomputationaloptimizationautomated,title={COMPAct: Computational Optimization and Automated Modular design of Planetary Actuators},author={Singh, Aman and Kapa, Deepak and Joshi, Suryank and Kolathaya, Shishir},year={2026},eprint={2510.07197},archiveprefix={arXiv},primaryclass={cs.RO},url={https://arxiv.org/abs/2510.07197},}
2025
Humanoids 2025
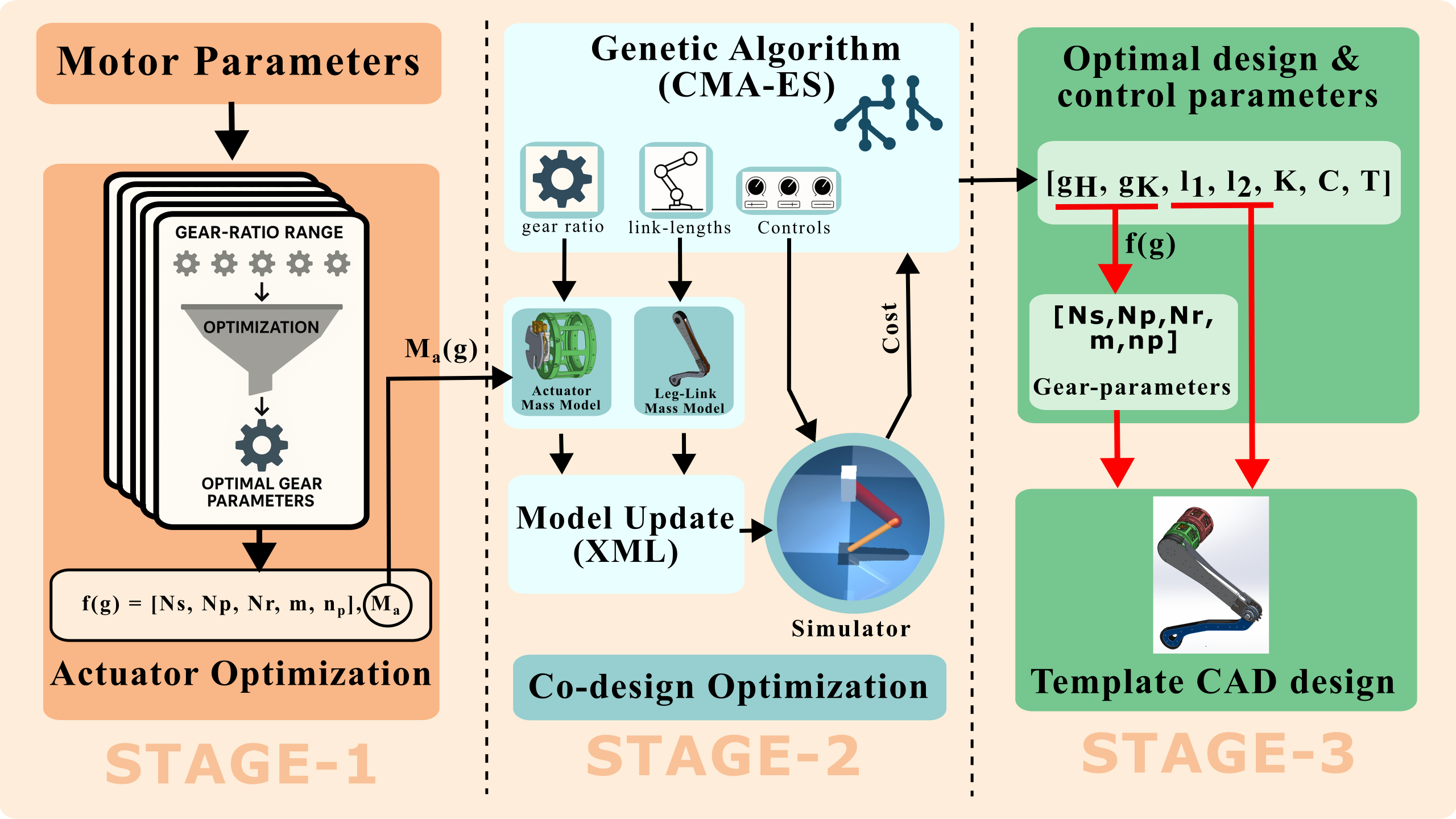
A Co-Design Framework for Energy-Aware Monoped Jumping with Detailed Actuator Modeling
Aman Singh, Aastha Mishra, Deepak Kapa, and 2 more authors
In 2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids), 2025
@inproceedings{humanoids2025codesignOfMonopedDetailedActuatorModelling,author={Singh, Aman and Mishra, Aastha and Kapa, Deepak and Joshi, Suryank and Kolathaya, Shishir},booktitle={2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids)},title={A Co-Design Framework for Energy-Aware Monoped Jumping with Detailed Actuator Modeling},year={2025},volume={},number={},pages={1012-1018},keywords={Fabrication;Solid modeling;Actuators;Energy consumption;Gears;Humanoid robots;Manuals;Mechanical energy;Optimization},doi={10.1109/Humanoids65713.2025.11203144},}
AIR 2025
A Chain-Driven, Sandwich-Legged Quadruped Robot: Design and Experimental Analysis
Aman Singh, Bhavya Giri Goswami, Ketan Nehete, and 1 more author
@misc{singh2025chaindrivensandwichleggedquadrupedrobot,title={A Chain-Driven, Sandwich-Legged Quadruped Robot: Design and Experimental Analysis},author={Singh, Aman and Goswami, Bhavya Giri and Nehete, Ketan and Kolathaya, Shishir N. Y.},year={2025},eprint={2503.14255},archiveprefix={arXiv},primaryclass={cs.RO},url={https://arxiv.org/abs/2503.14255},}
AIR 2025
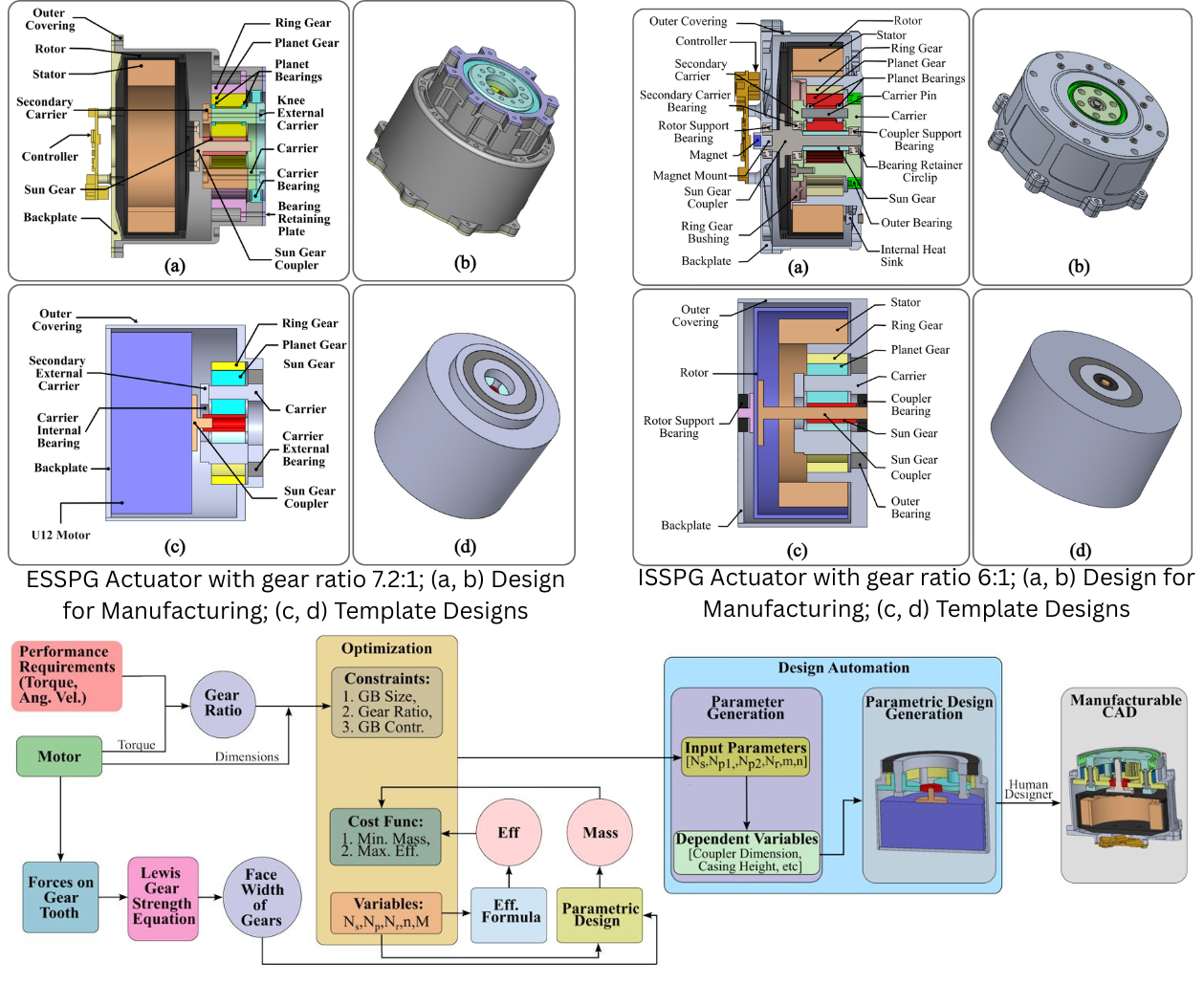
Comparison between External and Internal Single Stage Planetary gearbox actuators for legged robots
Aman Singh, Deepak Kapa, Prasham Chedda, and 1 more author
@misc{singh2025comparisonexternalinternalsingle,title={Comparison between External and Internal Single Stage Planetary gearbox actuators for legged robots},author={Singh, Aman and Kapa, Deepak and Chedda, Prasham and Kolathaya, Shishir N. Y.},year={2025},eprint={2506.16356},archiveprefix={arXiv},primaryclass={cs.RO},url={https://arxiv.org/abs/2506.16356},}
2023
ICRA 2023
Force control for Robust Quadruped Locomotion: A Linear Policy Approach
Aditya Shirwatkar, Vamshi Kumar Kurva, Devaraju Vinoda, and 7 more authors
In 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
@inproceedings{force_control_linear_policy,author={Shirwatkar, Aditya and Kurva, Vamshi Kumar and Vinoda, Devaraju and Singh, Aman and Sagi, Aditya and Lodha, Himanshu and Goswami, Bhavya Giri and Sood, Shivam and Nehete, Ketan and Kolathaya, Shishir},booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},title={Force control for Robust Quadruped Locomotion: A Linear Policy Approach},year={2023},volume={},number={},pages={5113-5119},keywords={Legged locomotion;Training;Force;Hardware;Trajectory;Quadrupedal robots;Force control;Quadruped Robots;Reinforcement Learning;Model Predictive Control (MPC);Linear policy},doi={10.1109/ICRA48891.2023.10161080},}
2022
ICRA 2022
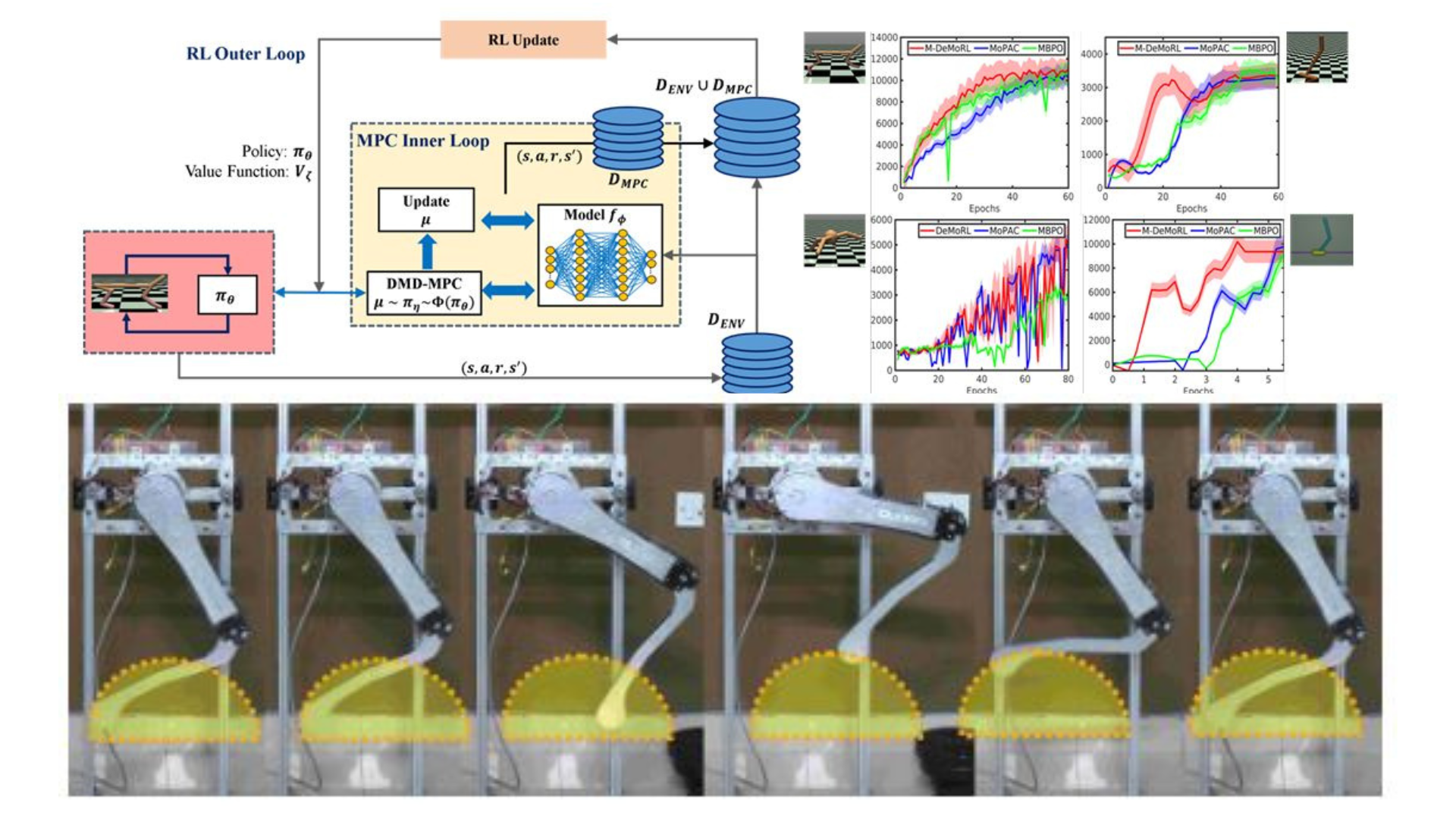
Dynamic Mirror Descent based Model Predictive Control for Accelerating Robot Learning
Utkarsh A. Mishra, Soumya R. Samineni, Prakhar Goel, and 6 more authors
In 2022 International Conference on Robotics and Automation (ICRA), 2022
@inproceedings{9812089,author={Mishra, Utkarsh A. and Samineni, Soumya R. and Goel, Prakhar and Kunjeti, Chandravaran and Lodha, Himanshu and Singh, Aman and Sagi, Aditya and Bhatnagar, Shalabh and Kolathaya, Shishir},booktitle={2022 International Conference on Robotics and Automation (ICRA)},title={Dynamic Mirror Descent based Model Predictive Control for Accelerating Robot Learning},year={2022},volume={},number={},pages={1631-1637},keywords={Training;Legged locomotion;Heuristic algorithms;Predictive models;Prediction algorithms;Hardware;Quadrupedal robots},doi={10.1109/ICRA46639.2022.9812089},}